Projects
A list of projects I have done in the past with brief explanations.
2020
Development of ADAS systems for trucks
Description: The project aims to develop Advanced driver-assistance systems for trucks and forklifts. The project is on-going and details are not open to public yet.
July 21, 2020
Description: The project aims to develop Advanced driver-assistance systems for trucks and forklifts. The project is on-going and details are not open to public yet.
July 21, 2020
Auto-Mapper
Description: The aim of Auto-Mapper is to plan the paths for multi-agent given a prior of an environment like a blueprint. The project skeletonizes the blueprint, finds the nodes to be visited to map the area well. It then generates the waypoints to be visited by each of the agents using Ant Colony Optimization-routing algorithm to solve the multi-agent travelling salesman problem. The pipeline then uses FMT* algorithm as a global planner, and a hierarchical controller for local planning and control. The hierarchical controller has a set of precomputed paths and the path maximizing an objective is chosen and tracked using MPC controller.
June 15, 2020
Description: The aim of Auto-Mapper is to plan the paths for multi-agent given a prior of an environment like a blueprint. The project skeletonizes the blueprint, finds the nodes to be visited to map the area well. It then generates the waypoints to be visited by each of the agents using Ant Colony Optimization-routing algorithm to solve the multi-agent travelling salesman problem. The pipeline then uses FMT* algorithm as a global planner, and a hierarchical controller for local planning and control. The hierarchical controller has a set of precomputed paths and the path maximizing an objective is chosen and tracked using MPC controller.
June 15, 2020
Constrained Action-Space Representation for Physical Manipulation
Description: Learning an action generator using a goal conditioned GAN penalized by a normalized diversification loss that prevents mode collapse and captures the real distribution better. A visual Model Predictive Controller was implemented for control. Details of approach and implementation can be found in report and github code linked below.
May 10, 2020
Description: Learning an action generator using a goal conditioned GAN penalized by a normalized diversification loss that prevents mode collapse and captures the real distribution better. A visual Model Predictive Controller was implemented for control. Details of approach and implementation can be found in report and github code linked below.
May 10, 2020
Racing Strategy: Planning and Control approaches
Description: This was a course project where we came up with racing and planning strategies to beat opponents. We tried to solve various aspects of developing an end-to-end racing strategy. The first task being raceline optimization to find an optimal path to follow. We then extend to local planning by selecting a path which is dynamically feasible, and at the same time collision free, to track the globally optimal path and finally use Model Predictive Control for this reference tracking. We also implement lane switching strategy to promote overtaking maneuvers. The project was successful in racing while driving at the speed of 4.5 m/s and tackling various scenarios arising in head-to-head race situations.
May 10, 2020
Description: This was a course project where we came up with racing and planning strategies to beat opponents. We tried to solve various aspects of developing an end-to-end racing strategy. The first task being raceline optimization to find an optimal path to follow. We then extend to local planning by selecting a path which is dynamically feasible, and at the same time collision free, to track the globally optimal path and finally use Model Predictive Control for this reference tracking. We also implement lane switching strategy to promote overtaking maneuvers. The project was successful in racing while driving at the speed of 4.5 m/s and tackling various scenarios arising in head-to-head race situations.
May 10, 2020
SLAM on THOR-Robot
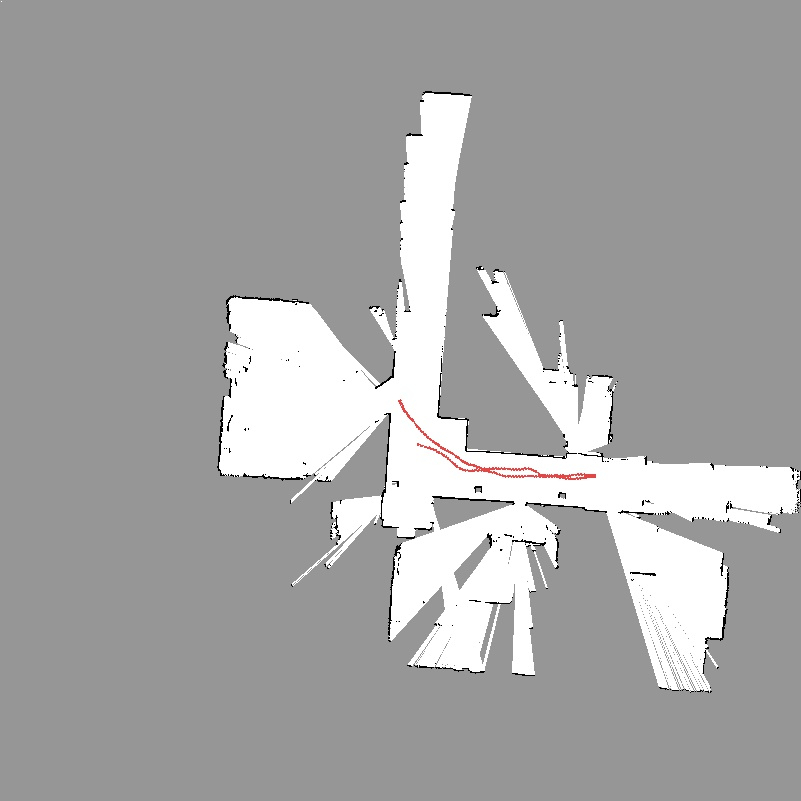
Description: The LIDAR scans from THOR-humanoid robot were used to perform simultaneous localization and mapping (SLAM). Particle filter was used for localization and occupancy grid was maintained for mapping and localization.
March 20, 2020
Description: The LIDAR scans from THOR-humanoid robot were used to perform simultaneous localization and mapping (SLAM). Particle filter was used for localization and occupancy grid was maintained for mapping and localization.
March 20, 2020
Duplicate detection using LSH
Description: Given a 150,000+ Amazon review dataset, the project aims to find all the similar review pairs and also all the similar reviews given a query text for some measure of similarity. Jaccard distance similarity metric was used. The k-shingle representation was used and min-hashing was performed as a locally sensitive hasing mechanism for faster processing. Comination of min-hashes were used to filter the search at the given similarity cutoff.
February 10, 2020
Description: Given a 150,000+ Amazon review dataset, the project aims to find all the similar review pairs and also all the similar reviews given a query text for some measure of similarity. Jaccard distance similarity metric was used. The k-shingle representation was used and min-hashing was performed as a locally sensitive hasing mechanism for faster processing. Comination of min-hashes were used to filter the search at the given similarity cutoff.
February 10, 2020
Unscented Kalman Filter
Description: Unscented Kalman Filter was implemented on dataset for roll, pitch and yaw estimation. The dataset included 3 axis Gyroscope and 3 axis Accelerometer data from a 6-axis IMU. The results were compared against the ground truth from the vicon motion capture camera data.
February 10, 2020
Description: Unscented Kalman Filter was implemented on dataset for roll, pitch and yaw estimation. The dataset included 3 axis Gyroscope and 3 axis Accelerometer data from a 6-axis IMU. The results were compared against the ground truth from the vicon motion capture camera data.
February 10, 2020
2019
Optical Flow for bounding box tracking
Description: This project aims to track the bounding box initialized at the first frame using Optical flow. The pixel flow is calculated on the features found using Harris Corner detector as well as Shi-Tomashi detector, and are regenerated whenever the tracker loses features. The are tracked using Lucas-Kanade Tracking algorithm and transformations are applied on the bounding box depending on the flow of the features.
December 10, 2019
Description: This project aims to track the bounding box initialized at the first frame using Optical flow. The pixel flow is calculated on the features found using Harris Corner detector as well as Shi-Tomashi detector, and are regenerated whenever the tracker loses features. The are tracked using Lucas-Kanade Tracking algorithm and transformations are applied on the bounding box depending on the flow of the features.
December 10, 2019
Image stitching - Panorama
Description: This project aims at stitching a given set overlapping images to create a stiched image or a panorama. Harris corners are detected, followed by performing Non-maximal suppression to disregard redundant and noisy features, feature descriptors are generated, RANSAC is performed to reject the outliers, Homography transformation is calculated and finally the image is stitched.
December 10, 2019
Description: This project aims at stitching a given set overlapping images to create a stiched image or a panorama. Harris corners are detected, followed by performing Non-maximal suppression to disregard redundant and noisy features, feature descriptors are generated, RANSAC is performed to reject the outliers, Homography transformation is calculated and finally the image is stitched.
December 10, 2019
Image morphing
Description: This project aims at morphing a given pair of images along with the corresponding feature correspondences. Delaunay triangulation is performed over the given pairs of images with the corresponding points as vertices. The geometry of the triangles is morphed by performing intermediate affine transformations and a sequence of morphs are generated.
December 10, 2019
Description: This project aims at morphing a given pair of images along with the corresponding feature correspondences. Delaunay triangulation is performed over the given pairs of images with the corresponding points as vertices. The geometry of the triangles is morphed by performing intermediate affine transformations and a sequence of morphs are generated.
December 10, 2019
Prediction and analysis of reception of comments on The New York Times articles
Description: This was a course project for Machine Learning course. This project aims to analyse and predict the reception of comments on the New York Times articles by the New York Times community. It also aims to analyse the features that play a key role in determining the reception, which is indicated by the number of recommendations a comment receives. Some of the main applications of this work would be to automate the process of editors’ selection for the comments as well as to highlight the comments which shall potentially be the top comments on the given article. We also examine the feasibility of online prediction of the number recommendations on the comments. The exploratory data analysis was performed and new, innovative features were engineered to help the cause. Various models were used and comparison of performance is reported.
December 10, 2019
Description: This was a course project for Machine Learning course. This project aims to analyse and predict the reception of comments on the New York Times articles by the New York Times community. It also aims to analyse the features that play a key role in determining the reception, which is indicated by the number of recommendations a comment receives. Some of the main applications of this work would be to automate the process of editors’ selection for the comments as well as to highlight the comments which shall potentially be the top comments on the given article. We also examine the feasibility of online prediction of the number recommendations on the comments. The exploratory data analysis was performed and new, innovative features were engineered to help the cause. Various models were used and comparison of performance is reported.
December 10, 2019
2018
CNC machine development and redesigning double parallelogram
Description: CNC controller was designed for the micro-milling machine used for manufacturing of base plates for the Hele-Shaw cell experiments. UGS was used to generate the g-codes and GRBL was used for the control using the g-codes passed to actuate stepper motors using Raspberry Pi microcontroller. Capacitive filter and the PCB were also designed for robustness to the switching noise of the stepper motor. The latter part of the internship was focussed on development of double parallelogram mechanism using sheet-metal bending for large scale fabrication.
December 31, 2018
Description: CNC controller was designed for the micro-milling machine used for manufacturing of base plates for the Hele-Shaw cell experiments. UGS was used to generate the g-codes and GRBL was used for the control using the g-codes passed to actuate stepper motors using Raspberry Pi microcontroller. Capacitive filter and the PCB were also designed for robustness to the switching noise of the stepper motor. The latter part of the internship was focussed on development of double parallelogram mechanism using sheet-metal bending for large scale fabrication.
December 31, 2018
Development of Underactuated Robotic Gripper
Description: Awarded internship by Mitacs for design, development, and control of an underactuated multi-finger adaptive gripper at the Human-Robot Interaction laboratory under the guidance of Dr. Mehrdad Kermani. The hand with abduction-adduction capability had the majority of parts produced by 3D printing followed by fine machining. Libraries were developed for digital servo motors which were connected in a daisy chain topology communicating via RS485 protocol and actuated by STM32F4 ARM cortex-based micro-controller programmed with RTOS for the precise control of the fingers.
September 10, 2018
Description: Awarded internship by Mitacs for design, development, and control of an underactuated multi-finger adaptive gripper at the Human-Robot Interaction laboratory under the guidance of Dr. Mehrdad Kermani. The hand with abduction-adduction capability had the majority of parts produced by 3D printing followed by fine machining. Libraries were developed for digital servo motors which were connected in a daisy chain topology communicating via RS485 protocol and actuated by STM32F4 ARM cortex-based micro-controller programmed with RTOS for the precise control of the fingers.
September 10, 2018
2017
Prediction of fractal formation
Description: Development of code for the geometry of fractal structure resulting from the Hele-Shaw cell experiment was developed and simulated in Matlab. Prediction for variety of base plate patterns with pits or lands were done and verified with the experimental results.
December 31, 2017
Description: Development of code for the geometry of fractal structure resulting from the Hele-Shaw cell experiment was developed and simulated in Matlab. Prediction for variety of base plate patterns with pits or lands were done and verified with the experimental results.
December 31, 2017
Design of compliant manipulator for micro-manipulation
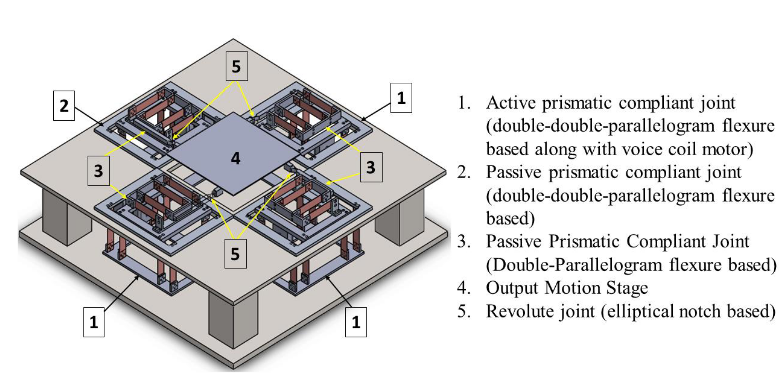
Description: The 4 PPR parallel manipulator with nano- manipulation capability was modeled using SolidWorks and its kinematic, inverse kinematic and dynamic analysis were done under the able guidance of Dr. Prasanna Gandhi and Dr. Yogesh Singh. The manipulator was flexure based to exploit the benefits of compliance for nano-manipulation, and U-base design was developed for its workspace superiority. The dynamic analysis was verified by the ANSYS simulation. The project work was presented at ICAME 2018 and published.
August 10, 2017
Description: The 4 PPR parallel manipulator with nano- manipulation capability was modeled using SolidWorks and its kinematic, inverse kinematic and dynamic analysis were done under the able guidance of Dr. Prasanna Gandhi and Dr. Yogesh Singh. The manipulator was flexure based to exploit the benefits of compliance for nano-manipulation, and U-base design was developed for its workspace superiority. The dynamic analysis was verified by the ANSYS simulation. The project work was presented at ICAME 2018 and published.
August 10, 2017
American sign language to Speech CONverter (ASCON)
Description: Designed a standalone Sign Language to Speech converter for speech impaired community. ASCON translated the hand gestures from the ASL to speech output. The glove had embedded flex sensors to sense the amount of bend in the fingers and was equipped with a 9-axis IMU sensor which had accelerometer and gyroscope used to provide the data about the motion of the hand, Kalman filter was implemented. The features were extracted from the data and used for training of the Artificial Neural Network and classification of the gestures to give the speech output with about 93% accuracy.
March 15, 2017
Description: Designed a standalone Sign Language to Speech converter for speech impaired community. ASCON translated the hand gestures from the ASL to speech output. The glove had embedded flex sensors to sense the amount of bend in the fingers and was equipped with a 9-axis IMU sensor which had accelerometer and gyroscope used to provide the data about the motion of the hand, Kalman filter was implemented. The features were extracted from the data and used for training of the Artificial Neural Network and classification of the gestures to give the speech output with about 93% accuracy.
March 15, 2017